
 |
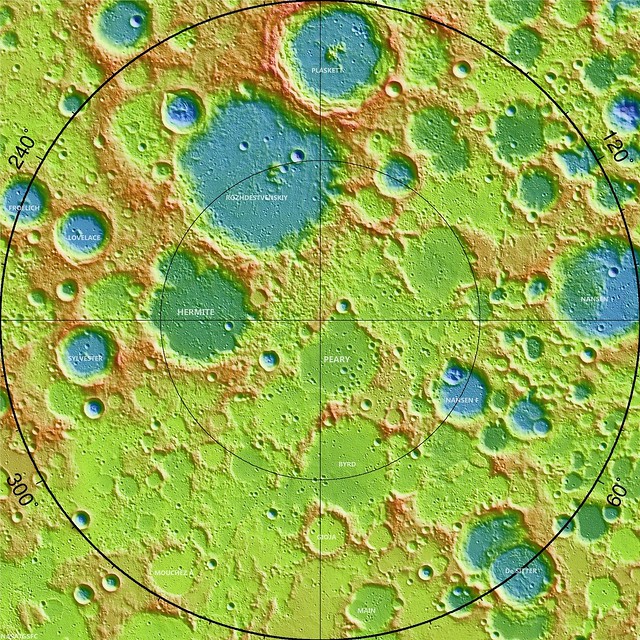
| Laser altimetry map of the Moon's northern polar region, north of 80° at 20 meters resolution. The crater Lovelace (57.06 km; 82.08°N, 250.49°E), referenced below, is southwest of Hermite, where the lowest temperatures yet recorded in the Solar System have been measured on the pole-facing walls, in permanent shadow [NASA/GSFC]. |

A SEARCH FOR TRANSIENT WATER FROST
AT THE LUNAR POLES
USING THE LUNAR ORBITER LASER ALTIMETER
M. Lemelin, et.al.
University of Hawaii at Manoa
Introduction: The possibility of lunar polar ice was suggested by Harold Urey in the 1950's [1], and has likely been directly detected at the North Pole of Mercury by MESSENGER. That detection was based on the presence of reflectance anomalies seen by the Mercury Laser Altimeter (MLA) that occurred only where models of the surface temperature allow long-duration preservation of surface water ice against sublimation [2,3].
Anomalous reflectance is also seen at the lunar poles, revealed by laser measurements. The reflectance of permanently shadowed regions is systematically higher than nearby areas that receive at least some illumination [2,3,4] (Fig. 1). Models suggest that if the higher reflectance is due to the presence of water ice; up to 14 wt.% could be present depending on the distribution of frost within or on the regolith.
 |
| Figure 1. DIVINER maximum temperature (left) and LOLA reflectance (right) for the north polar crater Lovelace. The blue patch in the temperature image shows the location of a permanently shadowed region. The corresponding location in the reflectance image clearly show higher reflectance than the surroundings |
In this study, we seek evidence for transient water frost on the polar surfaces using reflectance data from the Lunar Orbiter Laser Altimeter (LOLA), and temperature data from the DIVINER radiometer, both onboard the LRO. We aim to search for areas that may “load” with surface frost during the night causing in-creased reflectance, and unload during the day reducing the reflectance. Detection of transient surface frost constrains the rate of input into the lunar volatile system.
Methods and datasets: LOLA measures the backscattered energy of the returning altimetric laser pulse at 1064 nm. This data is used to map the reflectivity of the Moon at zero-phase angle with a photo-metrically uniform data set. The zero-phase geometry is insensitive to lunar topography and enables the characterization of subtle variations in lunar albedo, even at high latitudes where such measurements are not possible with the Sun as the illumination source. The DIVINER radiometer simultaneously measures the bolometric temperature of the lunar surface.
To find evidence of transient surface frost, we examined locations where reflectance data from LOLA exists at both low (less than 156 K, a loss of 100 μm of frost per month or less, sufficiently cold for ice to persist during a single lunar night [7,8]) and high temperatures (greater than 201 K, a loss of 1 mm of frost per month or more, no possibility of retaining surface ice [7,8]) using the DIVINER radiometer data, seeking changes in albedo with temperature. We search the LOLA reflectance dataset for locations that have reflectances measured at both low and high temperatures using DIVINER tem-perature measurements obtained simultaneously with LOLA data. For this initial search, we examined both polar regions at a spatial resolution of 2 pixels per degree (~15 km per pixel), within ±50-90º latitude.
To find evidence of transient surface frost, we examined locations where reflectance data from LOLA exists at both low (less than 156 K, a loss of 100 μm of frost per month or less, sufficiently cold for ice to persist during a single lunar night [7,8]) and high temperatures (greater than 201 K, a loss of 1 mm of frost per month or more, no possibility of retaining surface ice [7,8]) using the DIVINER radiometer data, seeking changes in albedo with temperature. We search the LOLA reflectance dataset for locations that have reflectances measured at both low and high temperatures using DIVINER tem-perature measurements obtained simultaneously with LOLA data. For this initial search, we examined both polar regions at a spatial resolution of 2 pixels per degree (~15 km per pixel), within ±50-90º latitude.
Initial Results: For both polar regions (±50-90º latitude), we find that most of the pixels outside permanently shadowed regions are subject to both low (less than 156 K) and high (greater than 201 K) temperatures. Figure 2 shows the LOLA reflectance data for both poles when the temperature of a given pixel is either greater than 156 K (Fig. 2 left) or greater than 201 K (Fig. 2, right).
Methods and datasets: LOLA measures the backscattered energy of the returning altimetric laser pulse at 1064 nm. This data is used to map the reflectivity of the Moon at zero-phase angle with a photo-metrically uniform data set. The zero-phase geometry is insensitive to lunar topography and enables the characterization of subtle variations in lunar albedo, even at high latitudes where such measurements are not possible with the Sun as the illumination source. The DIVINER radiometer simultaneously measures the bolometric temperature of the lunar surface.
By subtracting the 1064 nm reflectance when the temperature is high (greater than 201 K) from the reflectance when the temperature is low (below 156 K), we find that the global difference in reflectance averages near 0 for both polar regions (Fig. 3). Therefore, we do not detect a general temperature dependent reflectance variation.
Discussion and future work: We did not detect a general temperature dependent reflectance variation in our study for either polar region with a detection precision of about 1%. Using a simple model of a nonabsorbing layer over an absorbing substrate, a very small optical depth is required to raise the reflectance by 1%, only 0.045 ([9] Section 9.D.2). This corresponds to ~30 μg/cm2, a layer thickness of about 300 nm. In comparison, the observations of [5,6] require a layer thickness of at least 10's of nanometer to account for the observed band depths. This suggests that our current measurements are at the edge of detection of the source implied by the spacecraft observations. In contrast to the implications of the reported measurements, the solar wind can provide far less water; concentrated in a single layer, calculations by [10] suggest only 0.01 nm globally averaged per month.
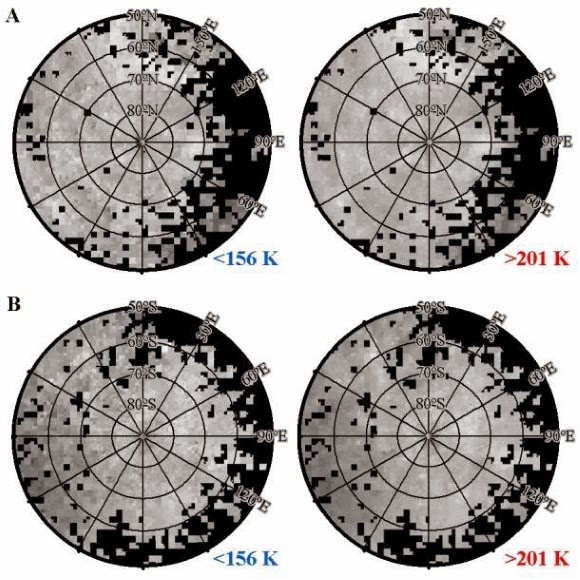 |
| Figure 2. LOLA 1064 nm reflectance for (A) the North Pole and (B) the South Pole. The reflectance when the temperature is low (less than 156°K) is shown on the left and the reflectance when the temperature is high (greater than 201°K) is shown on the right. |
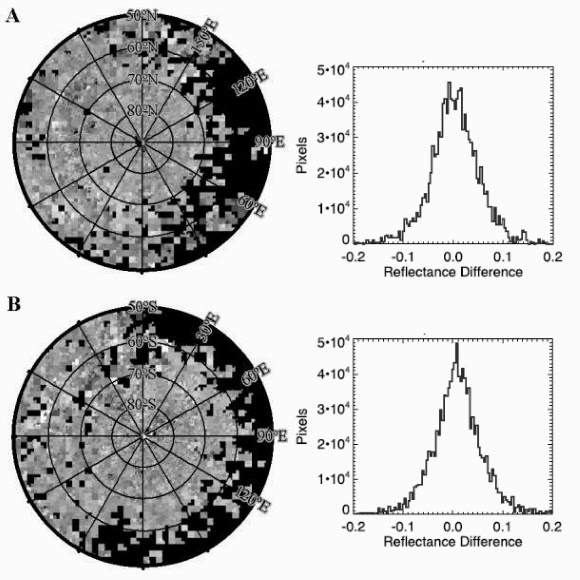 |
| Figure 3. LOLA 1064 nm reflectance difference between the reflectance when the temperature is high (greater than 201° K) and when the temperature is low (less than 156° K), for (A) the North Pole and (B) the South Pole. |
Our current analysis did not take into account how long each surface element has been subject to cold temperatures (i.e., if it had time to accumulate frost). For example, based on a Monte Carlo model, Schorghofer (2014) [11] showed that a continuous source of water molecules arriving on the lunar surface (regardless of the source) would significantly accumulate near the morning terminator. Additional calculations show that the morning terminator should feature about 30 times the concentration of the average nightside abundance, improving prospects for detection.
Future work includes reanalyzing existing data to include the time of exposure at low temperatures, and conducting targeted observations with LOLA to observe night time polar surfaces near the morning terminator in order to improve the upper limits of detection on transient water frost.
References: [1] Urey H. C. (1952) The Planets: Their Origin and Development. Yale University Press, New Haven, CT, 245 pp. [2] Paige D. A. et al. (2013) Science, 339, 300-303. [3] Neumann G. A. et al. (2013) Science, 339, 296-299. [4] Zuber M. T. et al. (2012) Nature, 486, 378-382. [5] Sunshine J. M. et al. (2009) Science, 326, 565-568. [6] Hendrix A. R. et al. (2012) JGR Planets, 117, E12001. [7] Zhang J. A. and Paige D. A. (2009) GRL, 36, L16203. [8] Zhang J. A. and Paige D. A. (2010) GRL, 37, L03203. [9] Hapke B. (1993) Theory of reflectance and emittance spectroscopy, Cambridge. [10] Hurley D. M. and Farrell W. M. (2013) LPSC 44, abstract #2015. [11] Schorghofer N. (2014) GRL, 41, 4888–4893.
Acknowledgments: This work is supported in part by the LRO LOLA experiment (David Smith PI), the LRO Diviner experiment (David Paige PI), and the Natural Science and Engineering Council of Canada (NSERC).
No comments:
Post a Comment